Leaping into innovation: CityUHK develops hybrid hopping robot with unrivalled mobility
A team of researchers at City University of Hong Kong (CityUHK) ingeniously integrated a spring-loaded telescopic leg beneath a quadcopter, creating an innovative hopping robot, named “Hopcopter”, which defies conventional boundaries. This breakthrough in robotic mobility has achieved unparalleled agility and efficiency, opening new possibilities for applications in complex environments.
Led by Professor Pakpong Chirarattananon, in the Departments of Biomedical Engineering (BME) and Mechanical Engineering, the Hopcopter team developed a hybrid robot that is capable of seamlessly transitioning between aerial flight and terrestrial hopping by integrating a passive telescopic leg with a nano quadcopter.
The research, titled “An agile monopedal hopping quadcopter with synergistic hybrid locomotion”, was recently published in the renowned journal Science Robotics.
Flying robots like quadcopters have become increasingly popular in recent years for recreational use, surveillance and research. Despite their widespread use, they have limitations, such as short flight time and limited load capacity.
In nature, many animals, like parrotlets and sparrows, combine jumping and flying to move efficiently, jumping between branches and flying short distances to navigate through trees, but replicating this natural efficiency in robots is challenging due to the complexity and limitations of traditional jumping mechanisms. Previous robots capable of both jumping and flying couldn’t usually maintain continuous hopping, fine-tune their jump height, or sustain flight for extended periods.
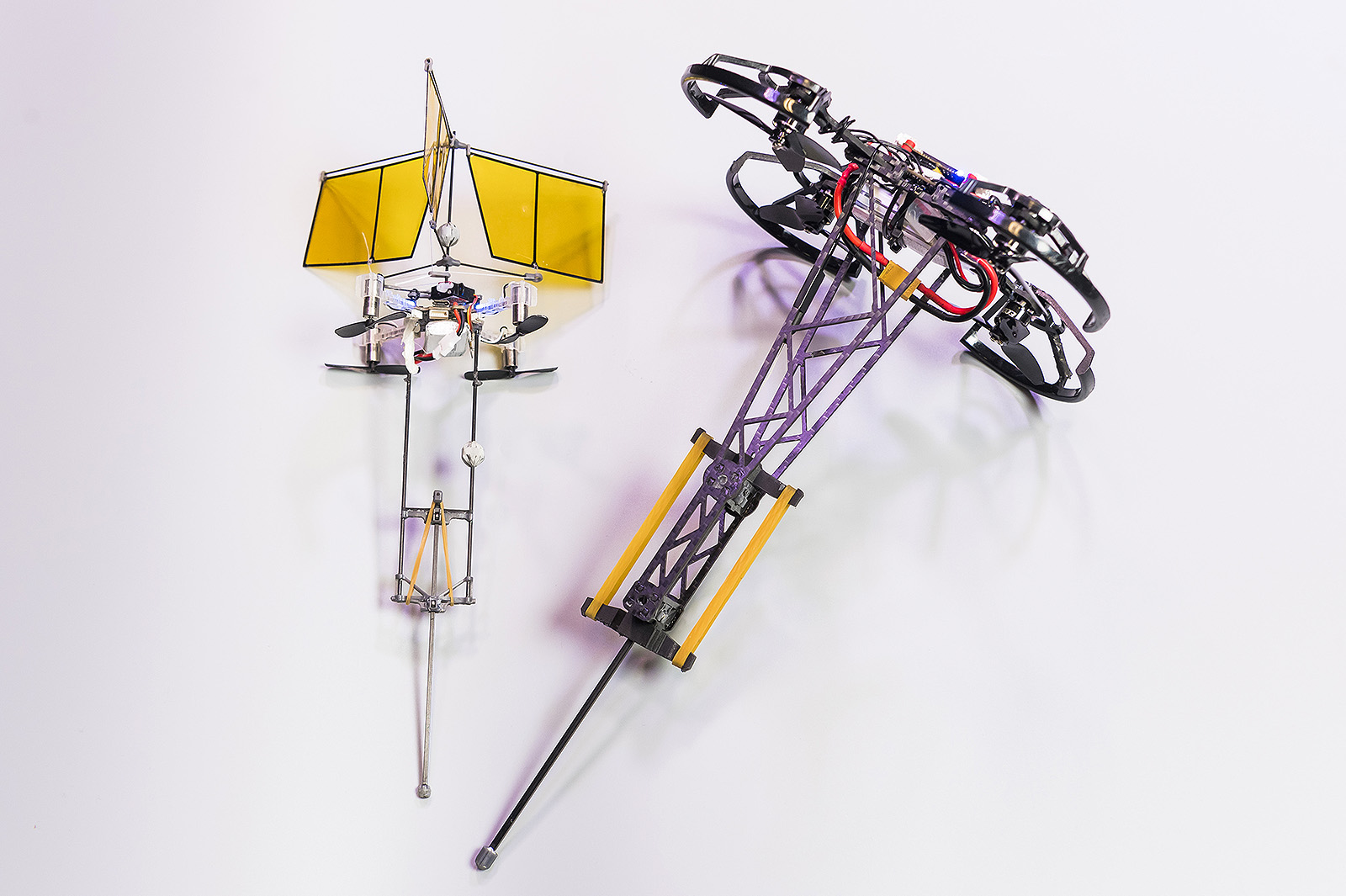
To address these limitations, the research team added a spring-loaded telescopic leg to a quadrotor, creating the Hopcopter. This passive elastic leg enables energy storage and release without the need for direct leg actuation, allowing the robot to efficiently alternate between flying and hopping and extending its operational time.
As a demonstration shows, the Hopcopter can move easily, hop, take off mid-hop, and fly like a regular quadcopter. It can hop at 2.38 meters per second and reach heights of 1.63 meters, surpassing the capabilities of state-of-the-art jumping robots. Hopcopter can also navigate uneven surfaces for search and rescue missions and use its leg as a bumper to prevent damage.
“Hopcopter’s ability to switch smoothly between flying and hopping could increase its range and operating time, making it a valuable tool for various industries,” said Dr Bai Songnan, Postdoc of BME and co-first author of the study.
“We are excited to see how this technology can be adapted and applied to address various challenges in robotics and beyond.” added Professor Chirarattananon.
The team will focus on further refining the Hopcopter design and exploring its potential applications in real-world scenarios.